1 DMA简介
DMA(Direct Memory Access, 直接寄存器存取)可以提供外设和存储器或者存储器和存储器之间的高速数据传输,无需CPU干预,节省了CPU的资源。DMA1具有7个独立可配置的通道,而DMA2具有5个,每个通道都支持软件触发和 特定 的硬件触发。
实现存储器和存储器之间的数据传输采用软件触发;而外设和存储器的数据传输,由于外设的数据是具有一定规律的,需要采用特定的硬件触发来实现,比如转运ADC数据时我们希望的是ADC转换完成后再进行数据的转运。
存储器映像

2 DMA初始化
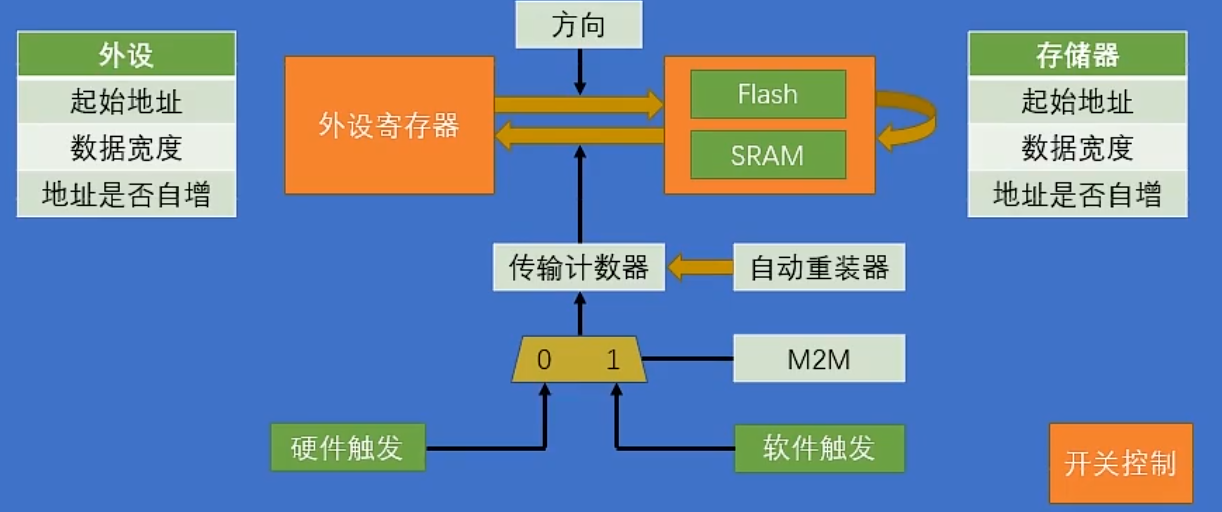
DMA可以实现存储器之间和存储器与外设之间的数据运输,即实现外设与存储器、存储器与外设、ROM到RAM之间的数据传输,注意,由于ROM为只读,因而不能DMA实现从RAM到ROM之间的数据传输。初始化时,需要给定起点的地址、终点的地址,而数据宽度则是定义单次运输数据的大小;而地址是否自增是指运输过程中是否需要将指针移到下一个位置。
如果源数据宽度大于目标数据宽度,而舍弃高位写入低位;如果源数据宽度小于目标数据宽度,则目标数据高位为0,源数据写入目标数据低位;当二者相等时则目标数据等于源数据。
传输计数器则是设定传输的次数,每次传输后计数器自减1,当计数器为0时计数器重装且终点地址回到初始地址以开始新一轮的数据转运。对于多规则通道ADC数据运输而言,这里的次数就是指通道数。
当不使用自动重装器时,则DMA在单轮转运结束后便停止,对应ADC中的单次扫描;而使用自动重装器,则DMA会循环传输数据,对应ADC中的连续扫描模式。
DMA进行转运的条件:①DMA使能;②传输计数器大于0;③具有一定的触发信号。当传输计数器等于0时,即使有触发信号也不再进行数据运输,需要先关闭DMA,即失能DMA后给计数器写入大于0的数再重启DMA才能恢复读取。
- 开启时钟
- 初始化,包括源、目的地、方向、是否自动重装、触发方式等.
- 使能DMA
3 DMA库函数实现
- 开启时钟
- 初始化
- 函数1
- 函数原型:
void DMA_Init(DMA_Channel_TypeDef* DMAy_Channelx, DMA_InitTypeDef* DMA_InitStruct); - 功能:初始化DMA.
DMA_InitStruct指向初始化结构体,定义如下:typedef struct { uint32_t DMA_PeripheralBaseAddr; // 外设地址 uint32_t DMA_PeripheralInc; // 是否自增 uint32_t DMA_PeripheralDataSize; // 数据宽度 uint32_t DMA_MemoryBaseAddr; // 存储器地址 uint32_t DMA_MemoryInc; // 是否自增 uint32_t DMA_MemoryDataSize; // 数据宽度 uint32_t DMA_DIR; // 传输方向 uint32_t DMA_BufferSize; // 传输计数器 uint32_t DMA_Mode; // 是否重装 uint32_t DMA_Priority; // 优先级 uint32_t DMA_M2M; // 触发方式 }DMA_InitTypeDef;
- 函数原型:
- 函数2
- 函数原型:
void DMA_StructInit(DMA_InitTypeDef* DMA_InitStruct); - 功能:对DMA初始化结构体成员进行初始化,赋值为默认值。
- 函数原型:
- 函数3
- 函数原型:
void DMA_SetCurrDataCounter(DMA_Channel_TypeDef* DMAy_Channelx, uint16_t DataNumber); - 功能:单独给计数器写入值
- 函数原型:
- 中断配置
- 函数1
- 函数原型:
void DMA_ITConfig(DMA_Channel_TypeDef* DMAy_Channelx, uint32_t DMA_IT, FunctionalState NewState); - 功能:配置传输完成后是否触发中断
- 函数原型:
- 函数2-5
- 函数1:
FlagStatus DMA_GetFlagStatus(uint32_t DMAy_FLAG); - 函数2:
void DMA_ClearFlag(uint32_t DMAy_FLAG); - 函数3:
ITStatus DMA_GetITStatus(uint32_t DMAy_IT); - 函数4:
void DMA_ClearITPendingBit(uint32_t DMAy_IT);
- 函数1:
- 使能DMA
- 函数1
- 函数原型:
void DMA_Cmd(DMA_Channel_TypeDef* DMAy_Channelx, FunctionalState NewState); - 功能:开启DMA
- 函数原型:
- 函数2
- 函数原型:
uint16_t DMA_GetCurrDataCounter(DMA_Channel_TypeDef* DMAy_Channelx); - 功能:获取转运结果
- 函数原型:
- 代码实现
uint16_t MyDMA_Size;
void MyDMA_Init(uint32_t AddrA, uint32_t AddrB, uint8_t Size){
RCC_AHBPeriphClockCmd(RCC_AHBPeriph_DMA1, ENABLE);
DMA_InitTypeDef DMA_InitStructrue;
DMA_StructInit(&DMA_InitStructrue);
DMA_InitStructrue.DMA_PeripheralBaseAddr = &AddrA;
DMA_InitStructrue.DMA_PeripheralInc = DMA_PeripheralInc_Enable;
DMA_InitStructrue.DMA_PeripheralDataSize = DMA_PeripheralDataSize_Byte;
DMA_InitStructrue.DMA_MemoryBaseAddr = &AddrB;
DMA_InitStructrue.DMA_MemoryInc = DMA_MemoryInc_Enable;
DMA_InitStructrue.DMA_MemoryDataSize = DMA_MemoryDataSize_Byte;
DMA_InitStructrue.DMA_DIR = DMA_DIR_PeripheralSRC; // 外设为源
DMA_InitStructrue.DMA_BufferSize = Size;
MyDMA_Size = Size;
DMA_InitStructrue.DMA_Mode = DMA_Mode_Normal;
DMA_InitStructrue.DMA_Priority = DMA_Priority_Medium;
DMA_InitStructrue.DMA_M2M = DMA_M2M_Enable; // 软件触发
DMA_Init(DMA1_Channel1, &DMA_InitStructrue);
DMA_Cmd(DMA1_Channel1, DISABLE);
}
// 重新开启DMA
viod MyDMA_Transfer(void){
DMA_Cmd(DMA1_Channel1, DISABLE);
DMA_SetCurrDataCounter(DMA1_Channel1, MyDMA_Size);
DMA_Cmd(DMA1_Channel1, ENABLE);
while(DMA_GetFlagStatus(DMA1_FLAG_TC1) == RESET);
DMA_ClearFlag(DMA1_FLAG_TC1);
}
uint8_t a = {0x01, 0x02, 0x03, 0x04};
uint8_t b = {0, 0, 0, 0};
int main(void){
MyDMA_Init((uint32_t)a, (uint32_t)b, 4);
MyDMA_Transfer();
} 4 ADC+DMA库函数实现
uint6_t AD_Value[4];
void ADC_Init(void){
RCC_APB2PeriphClockCmd(RCC_APB2Periph_ADC1, ENABLE);
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA, ENABLE);
RCC_AHBPeriphClockCmd(RCC_AHBPeriph_DMA1, ENABLE);
RCC_ADCCLKConfig(RCC_PCLK2_Div6);
GPIO_InitTypeDef GPIO_InitStructrue;
GPIO_InitStructrue.GPIO_Pin = GPIO_Pin_0 | GPIO_Pin_1 |GPIO_Pin_2 |GPIO_Pin_3;
GPIO_InitStructrue.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_InitStructrue.GPIO_Mode = GPIO_Mode_AIN;
GPIO_Init(GPIOA, &GPIO_InitStructrue);
ADC_RegularChannelConfig(ADC1, ADC_Channel_0, 1, ADC_SampleTime_55Cycles5);
ADC_RegularChannelConfig(ADC1, ADC_Channel_1, 2, ADC_SampleTime_55Cycles5);
ADC_RegularChannelConfig(ADC1, ADC_Channel_2, 3, ADC_SampleTime_55Cycles5);
ADC_RegularChannelConfig(ADC1, ADC_Channel_3, 4, ADC_SampleTime_55Cycles5);
ADC_InitTypeDef ADC_InitStructrue;
ADC_StructInit(&ADC_InitStructrue);
ADC_InitStructrue.ADC_Mode = ADC_Mode_Independent;
ADC_InitStructrue.ADC_ScanConvMode = ENABLE;
ADC_InitStructrue.ADC_ContinuousConvMode = ENABLE;
ADC_InitStructrue.ADC_ExternalTrigConv = ADC_ExternalTrigConv_None;
ADC_InitStructrue.ADC_DataAlign = ADC_DataAlign_Right;
ADC_InitStructrue.ADC_NbrOfChannel = 4;
ADC_Init(ADC1, &ADC_InitStructrue);
DMA_InitTypeDef DMA_InitStructrue;
DMA_InitStructrue.DMA_PeripheralBaseAddr = (uint32_t)&ADC->DR;
DMA_InitStructrue.DMA_PeripheralInc = DMA_PeripheralInc_Disable;
DMA_InitStructrue.DMA_PeripheralDataSize = DMA_PeripheralDataSize_Word;
DMA_InitStructrue.DMA_MemoryBaseAddr = AD_Value;
DMA_InitStructrue.DMA_MemoryInc = DMA_MemoryInc_Enable;
DMA_InitStructrue.DMA_MemoryDataSize = DMA_MemoryDataSize_HalfWord;
DMA_InitStructrue.DMA_DIR = DMA_DIR_PeripheralSRC;
DMA_InitStructrue.DMA_BufferSize = 4;
DMA_InitStructrue.DMA_Mode = DMA_Mode_Circular;
DMA_InitStructrue.DMA_Priority = DMA_Priority_High;
DMA_InitStructrue.DMA_M2M = DMA_M2M_Disable;
DMA_Init(DMA1_Channel1, &DMA_InitStructrue);
ADC_DMACmd(ADC1, ENABLE);
ADC_Cmd(ADC1, ENABLE);
ADC_ResetCalibration(ADC1);
while(ADC_GetResetCalibrationStatus(ADC1) == SET); // 等待复位校准完成
ADC_StartCalibration(ADC1);
while(ADC_GetCalibrationStatus(ADC1) == SET); // 获取校准状态
ADC_SoftwareStartConvCmd(ADC1, ENABLE);
}
